
Ceci est une ancienne révision du document !
lire aussi le README sur github
Le principe même du panorama entre deux photo est de reperer les similitudes entres elles comme des coins ou autres formes facilement reperables. Prenons ces deux photos pour entrainement


on peut visionner ces formes de cette façon en python
img =cv2.imread('panorama_0.jpg') img_gray =cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) sift_obj =cv2.xfeatures2d.SIFT_create() kp, _ =sift_obj.detectAndCompute(img_gray, None) img =cv2.drawKeypoints(img_gray, kp, img) # img =cv2.drawKeypoints(img_gray, kp, img, flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS) cv2.imshow('w', img) while cv2.waitKey(10) != 27: continue

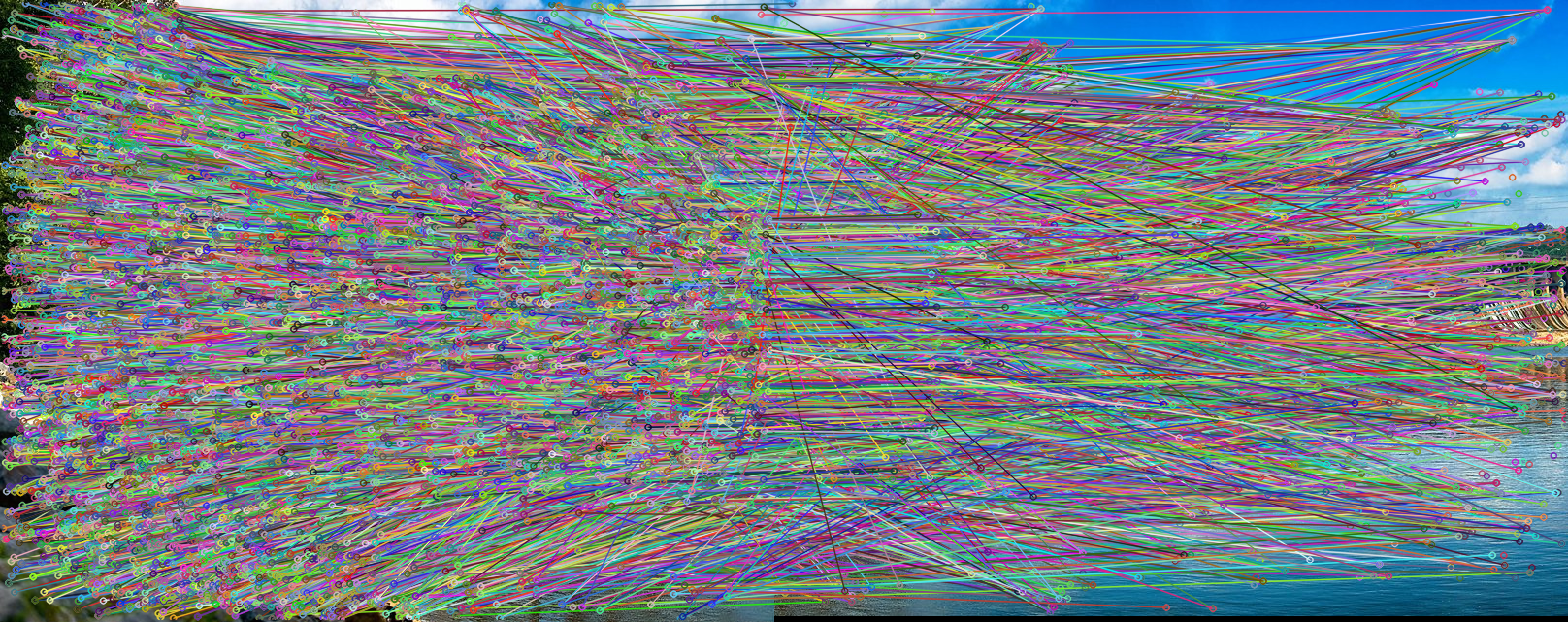
avant de faire la fusion il faut trouver les points qui se trouve sur les 2 images, on peut visionner cela avec ce code
img1c =cv2.imread('panorama_0.jpg') img2c =cv2.imread('panorama_1.jpg') sift_obj =cv2.xfeatures2d.SIFT_create() kp1, des1 =sift_obj.detectAndCompute(img1c, None) kp2, des2 =sift_obj.detectAndCompute(img2c, None) # FLANN parameters FLANN_INDEX_KDTREE = 0 index_params = dict(algorithm = FLANN_INDEX_KDTREE, trees = 5) search_params = dict(checks=50) # or pass empty dictionary flann = cv2.FlannBasedMatcher(index_params,search_params) matches = flann.knnMatch(des1,des2,k=2) img3 = cv2.drawMatchesKnn(img1c,kp1,img2c,kp2,matches,None) cv2.imshow("correspondences", img3) cv2.waitKey()
on visionne les points repere entres les 2 images, on peut voir qu'il y en a beaucoup
puis on peut utiliser le code decrit dans ce tuto https://www.pyimagesearch.com/2016/01/11/opencv-panorama-stitching/ pour fusionner les deux parties.
Le programme python etant lent je décide dans la suite de ce tuto d'utiliser du code cpp, un programme deja ecrit qui permettra de créer des panorama cylindrique et stéréographique.
./stitching --features orb --warp stereographic picture*.jpg ./stitching --features orb --warp cylindric picture*.jpg
on souhaite faire un panorama 360° avec des photos prise par la camera du rpi, on aurrait pu utiliser plusieurs rpi cote à cote, avec des inclinaisons differentes, mais l'option d'utiliser 2 servomoteurs permettra d'avoir une vue spherique de l'ensemble de l'environnement juste avec qu'un camera pi.

avant de lancer le panorama, il faut preparer un programme python pour diriger la camera selon n'importe quel inclinaison je décide de créer une fonction prenant 2 argument [-180..180] pour autour de l'axe vertical, [0..90] autour de l'axe horizontal. voici le code python
import RPi.GPIO as GPIO import time def angle(vAngle, hAngle): hPin=21 vPin=16 GPIO.setwarnings(False) GPIO.setmode(GPIO.BCM) GPIO.setup(hPin, GPIO.OUT) GPIO.setup(vPin, GPIO.OUT) f=50 hPwm =GPIO.PWM(hPin, f) vPwm =GPIO.PWM(vPin, f) assert (-180 <= vAngle and vAngle <= 180) assert (0 <= hAngle and hAngle <= 90) if -90 <= vAngle and vAngle <= 90: vPwm.start(11 -(vAngle +90) *8 /180.0) hPwm.start(hAngle *4 /90.0 +2) elif vAngle < -90: vPwm.start(7 -(vAngle +180) *4 /90.0) hPwm.start(10 -hAngle *4 /90.0) else: vPwm.start(11 -(vAngle -90) *4 /90.0) hPwm.start(10 -hAngle *4 /90.0) time.sleep(1) hPwm.stop vPwm.stop
on peut prendre des photos avec une inclinaisons autours de l'axe horizontal de 0 et 45 degre tout autour de l'axe vertical d'un pas de 45 degre avec le code suivant, en n'oubliant pas d'importer le code precedent
from servo import angle import os #cap = cv2.VideoCapture(0) #cap.set(3, 1920) #cap.set(4, 1080) #cap.set(6, cv2.VideoWriter.fourcc('M', 'J', 'P', 'G')) #angle(0, 0) #_, frame =cap.read() #cv2.imwrite('photo_0_0.jpg', frame) for i in (0, 45): for j in (0, 45, 90, 135, 180, -135, -90, -45): angle(j, i) if -90 <= j and j <= 90: os.system('raspistill -t 1 -vf -hf -o photo_' +str(j) +'_' +str(i) +'.jpg') else: os.system('raspistill -t 1 -o photo_' +str(j) +'_' +str(i) +'.jpg')
j'utilise raspistill au lieu d'utiliser VideoCapture de opencv, en n'oubliant pas de tourner l'image avec l'option vf et hf de raspistill
telechargeons le code cpp sur github https://github.com/opencv/opencv/blob/master/samples/cpp/stitching.cpp
g++ stitching.cpp `pkg-config --cflags --libs opencv` -o stitching
prise de vue salle de cours, team be traitement d'image sous rpi:
mode cylindrique:
./stitching --features orb --warp cylindric

mode stereographique:
./stitching --features orb --warp stereographic